89ASUS ROG Zephyrus G16 (2024) review: Not just for gamersA great display and lots of horsepower make this a great media editing machine too.By S. Rutherford, 14 hours ago
X's AI bot is so dumb it can't tell the difference between a bad game and vandalismBy S. Rutherford, 12 hours ago
Twitch is giving all users access to its discovery feed later this monthIt will first appear as a tab, but Twitch's ultimate goal is to make the feed its app's landing page.By M. Moon, an hour ago
Media coalition asks the feds to investigate Google’s removal of California news linksThe company yanked the URLs in response to a proposed law that would require it to pay publishers.By W. Shanklin, 8 hours ago
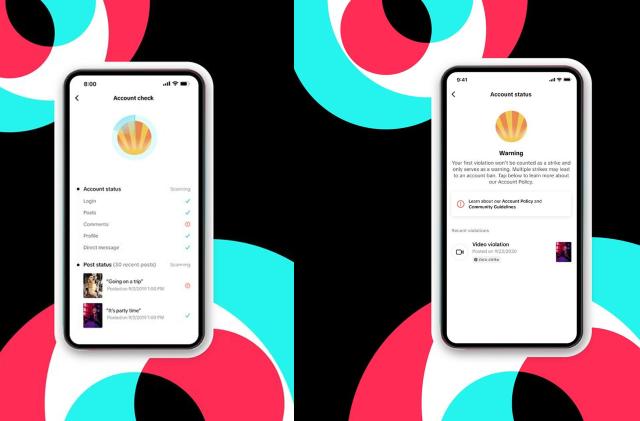
TikTok is trying to clean up its ‘For You’ recommendationsThe app will penalize creators who repeatedly post potentially “problematic” content.By K. Bell, 9 hours ago
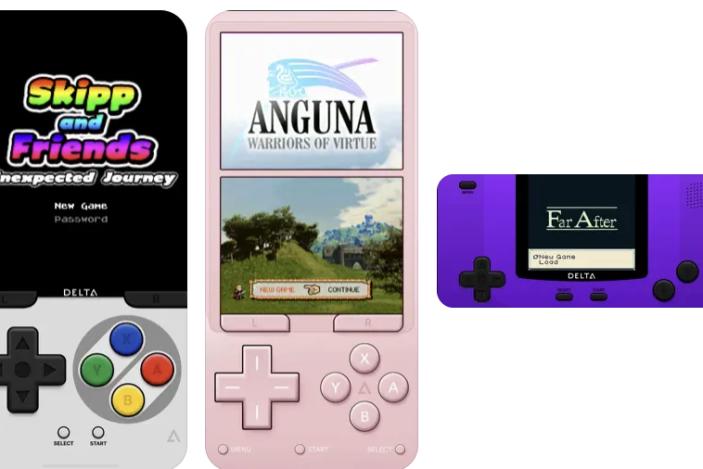
Nintendo emulator Delta hits the iOS App Store, no sideloading requiredCreator Riley Testut's AltStore app marketplace is also more easily available in the EU.By K. Holt, 9 hours ago
Amazon says a whopping 140 third-party stores in four countries use its Just Walk Out techThat’s about one location for every 3.3 million people.By W. Shanklin, 10 hours ago
There’s a TV show coming based on Sega's classic arcade game Golden AxeThe Comedy Central cartoon stars Danny Pudi, Carl Tart, Lisa Gilroy and Matthew Rhys.By L. Bonk, 11 hours ago
Cheaper Evercade retro consoles will arrive in JulyThe first three Tomb Raider games will be bundled with the EXP-R and VS-R.By K. Holt, 12 hours ago
LG's S95TR soundbar with wireless Dolby Atmos is now available for $1,500It's pricey, but it comes with a subwoofer and rear speakers. By B. Steele, 12 hours ago
Apple renews For All Mankind and announces a spinoff series set in the Soviet UnionHi Bobs. By L. Bonk, 12 hours ago
X’s AI bot is so dumb it can’t tell the difference between a bad game and vandalismShooting bricks in basketball and throwing bricks at people’s homes are NOT the same thing, Grok.By S. Rutherford, 12 hours ago
Creepy monitoring service sells searchable Discord user data for as little as $5Perfect for the cop, AI entrepreneur or jilted ex in your life.By W. Shanklin, 13 hours ago
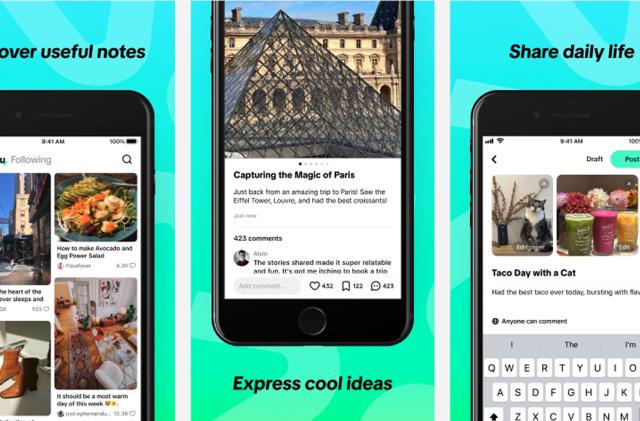
TikTok Notes is basically Instagram for your TikTok accountThe experimental app is available in Australia and Canada.By K. Bell, 13 hours ago
Lorelei and the Laser Eyes, by Sayonara Wild Hearts devs, comes out on May 16It’ll be available on the Switch and PC via Steam. By L. Bonk, 13 hours ago
Yars Rising revives a 40-year-old Atari game as a modern metroidvaniaYes, you read that right. By L. Bonk, 13 hours ago
Shadow platformer Schim is coming to PC and consoles on July 18This pretty indie sees you playing as a lost creature trying to get back to its human companion.By K. Holt, 13 hours ago
Good riddance, WH-XB910N: Sony’s confusing product names are going awayThe new schemes should be much easier to understand. By B. Steele, 13 hours ago
Sony’s new Bravia TVs boast powerful processors and a Prime Video calibration modeThe company also ditched the confusing alpha-numeric naming convention. By L. Bonk, 14 hours ago
Sony debuts Bravia Theater line of Dolby Atmos soundbars and speakersConfusing product names are gone on the latest home theater devices. By B. Steele, 14 hours ago
89ASUS ROG Zephyrus G16 (2024) review: Not just for gamersA great display and lots of horsepower make this a great media editing machine too.By S. Rutherford, 14 hours ago
Boston Dynamics unveils an all-electric version of its Atlas robotA brief video shows off the bipedal machine's dexterity and agility.By K. Holt, 14 hours ago