Microsoft's OpenAI partnership was born from Google envyCEO Satya Nadella forwarded an email saying the company was “very, very worried” about its rival’s capabilities.By W. Shanklin, 2 hours ago
Rabbit denies claims that its R1 virtual assistant is a glorified Android appBy M. Moon, 10 hours ago
Apple's second-generation AirPods Pro are back down to their lowest price everBy A. Skorheim, 04.29.2024
Apple's second-generation AirPods Pro are back down to their lowest price everBy A. Skorheim, 04.29.2024
A researcher is suing Meta for the right to ‘turn off’ Facebook’s news feedIf successful, he’ll release a browser extension called “Unfollow Everything 2.0.” By K. Bell, an hour ago
Microsoft’s OpenAI partnership was born from Google envyCEO Satya Nadella forwarded an email saying the company was “very, very worried” about its rival’s capabilities.By W. Shanklin, 2 hours ago
Explore Starfield's barren planets at 60 fps on Xbox Series X starting this monthThe May update also makes surface maps legible.By J. Conditt, 3 hours ago
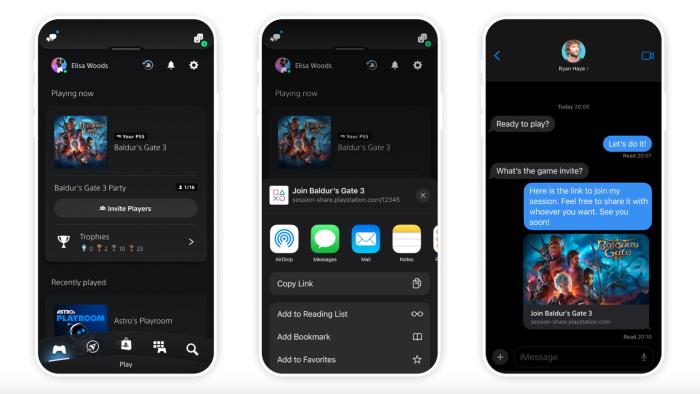
PS5 update will let you invite people to multiplayer games through your smartphone's appsIt works via a shareable link, so they don’t have to be on your friends list. By L. Bonk, 3 hours ago
Block reportedly greenlit transactions involving terrorist groups and sanctioned nationsFederal prosecutors are allegedly probing the Jack Dorsey-run company’s lapses.By W. Shanklin, 4 hours ago
May's PlayStation Plus games include Ghostrunner 2 and the modern classic TunicThere’s also Destiny 2: Lightfall and EA Sports FC 24.By L. Bonk, 5 hours ago
Xbox Series X/S storage expansion cards from WD and Seagate are discounted right nowYes, proprietary storage sucks, but you can save at least a little more than usual on a 1TB or 2TB card.By J. Dunn, 6 hours ago
Batman: Arkham Shadow is the first big exclusive VR game for the Quest 3It’s a new story set in the franchise canon. By L. Bonk, 6 hours ago
TikTok might be going around Apple's in-app purchase rules for its coinsThe platform appears to be directing users to "avoid in-app service fees."By S. Fielding, 8 hours ago
LinkedIn now has Wordle-style games you can play every dayHow long until "What I learned about B2B sales from playing Crossclimb"?By K. Bell, 9 hours ago
Ring's new indoor camera lets you pan and tilt for a better viewIt’ll cost $80 and be available May 30.By D. Cooper, 9 hours ago
Rabbit denies claims that its R1 virtual assistant is a glorified Android appThe $199 device recently started making its way to early adopters.By M. Moon, 10 hours ago
The Morning After: Our verdict on the Beats Solo 4 headphonesWith a heady 50 hours of playback. By M. Smith, 10 hours ago
The best apps and services for new graduatesAll the tools a grad needs to commute, get work done and have fun.By J. Fingas, 10 hours ago
The best webcams for 2024We tested and reviewed a number of 1080p, 2K and 4K webcams to see which are worth your money.By V. Palladino, 13 hours ago
Microsoft and OpenAI sued yet again by Chicago Tribune and New York Daily NewsThe publications accuse the companies of using their copyrighted materials for AI training.By M. Moon, 13 hours ago
The best gaming accessories on a budget for 2024PC gaming keyboards, headsets and mice that won't hurt your bottom line. By K. Naudus, 15 hours ago
The Cheyenne Supercomputer is going for a fraction of its list price at auction right nowThe US government is unloading the 5.34-petaflop system for far less then it paid for it. By A. Skorheim, a day ago
Binance founder Changpeng Zhao sentenced to four months in prisonFederal prosecutors recommended three years.By W. Shanklin, 04.30.2024
Assassin’s Creed Mirage finally arrives on June 6 for iPhone and iPadUbisoft promises “the same experience as the console version,” which we enjoyed.By W. Shanklin, 04.30.2024