82 13Dell XPS 13 and XPS 14 review (2024): Gorgeous laptops with usability quirksWhat will you pay for pretty laptops? By D. Hardawar, 10 hours ago
Samsung's Galaxy S24 Ultra falls to a new low, plus the rest of the week's best tech dealsBy J. Dunn, 5 hours ago
The FTC accuses Amazon of using Signal’s auto-deleting messages to erase evidenceThe agency asked a federal judge to force the company to turn over new documents.By W. Shanklin, 2 hours ago
Drake deletes AI-generated Tupac track after Shakur’s estate threatened to sueThe Canadian star used deepfakes of Shakur and Snoop Dogg’s voices to diss Kendrick Lamar.By W. Shanklin, 4 hours ago
Aaron Sorkin is working on a Jan. 6-focused follow-up to The Social NetworkHe blames Facebook for the Capitol attack, so that could make for one interesting movie.By L. Bonk, 4 hours ago
Samsung's Galaxy S24 Ultra falls to a new low, plus the rest of the week's best tech dealsIncluding discounts on Apple's MacBook Air, Samsung OLED TVs and a few recommended wireless earbuds.By J. Dunn, 5 hours ago
31Nikon’s Z8 is a phenomenal mirrorless camera for the priceWith 8K video and a 45-megapixel sensor, it's a cheaper alternative to Sony's A1.By S. Dent, 5 hours ago
Some of our favorite Bose headphones and earbuds are back to all-time low pricesGet the Bose QuietComfort Ultra headphones for $50 off.By W. Shanklin, 5 hours ago
Apple's 13-inch MacBook Air with the M3 chip has never been cheaperOur favorite laptop is just $989 at Amazon right now. By A. Skorheim, 6 hours ago
NHTSA concludes Tesla Autopilot investigation after linking the system to 14 deathsThe organization has opened a new inquiry into the efficacy of recent software fixes.By L. Bonk, 7 hours ago
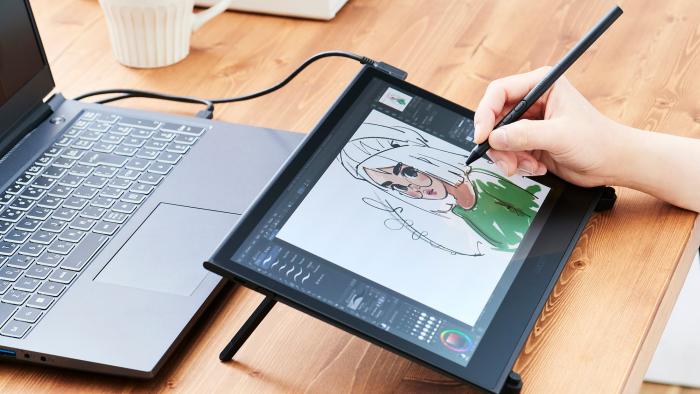
Wacom's first OLED pen display is also the thinnest and lightest it has ever madeThe 13-inch Movink is available now for $750.By B. Steele, 8 hours ago
It doesn’t matter how many Vision Pro headsets Apple sellsCan we all just calm down a bit?By S. Rutherford, 9 hours ago
The Google Pixel Buds Pro are back on sale for $135That's the lowest price we've seen for the noise-canceling earbuds in 2024. By J. Dunn, 10 hours ago
82 13Dell XPS 13 and XPS 14 review (2024): Gorgeous laptops with usability quirksWhat will you pay for pretty laptops? By D. Hardawar, 10 hours ago
OpenAI's Sam Altman and other tech leaders join the federal AI safety boardIt's like turkeys being appointed to the Christmas oversight board. By M. Moon, 11 hours ago
The best gaming gear for graduatesWhether they’re playing games for fun or a future career, these are the best items to get.By K. Naudus, 11 hours ago
The Morning After: Apple announces an iPad event for May 7And here's what we're expecting.By M. Smith, 12 hours ago
Engadget Podcast: Why TikTok will never be the same againBiden passed the TikTok divestment bill -- now what?By D. Hardawar, 12 hours ago
The best wireless earbuds for 2024Noise-cancelling, sport models and cheap wireless Bluetooth earbud options galore.By B. Steele, 16 hours ago
Apple is launching new iPads May 7: Here's what to expect from the 'Let Loose' eventWe're likely to see an OLED iPad Pro and new iPad Air, as well as updated peripherals.By K. Holt, 04.25.2024
Spotify tests Apple's resolve with new pricing update in the EUApple is in hot water with the EU for self-preferencing. By S. Fielding, 04.25.2024
Tupac’s estate threatens to sue Drake for his AI-infused Kendrick Lamar dissShakur’s estate may deliver Drake his AI comeuppance.By W. Shanklin, 04.25.2024