82 13Dell XPS 13 and XPS 14 review (2024): Gorgeous laptops with usability quirksWhat will you pay for pretty laptops? By D. Hardawar, 5 hours ago
Samsung's Galaxy S24 Ultra is on sale for its lowest price yet at Amazon and Best BuyBy A. Skorheim, 04.23.2024
Samsung's Galaxy S24 Ultra is on sale for its lowest price yet at Amazon and Best BuyBy A. Skorheim, 04.23.2024
Apple's 13-inch MacBook Air with the M3 chip has never been cheaperOur favorite laptop is just $989 at Amazon right now. By A. Skorheim, 24 minutes ago
NHTSA concludes Tesla Autopilot investigation after linking the system to 14 deathsThe organization has opened a new inquiry into the efficacy of recent software fixes.By L. Bonk, an hour ago
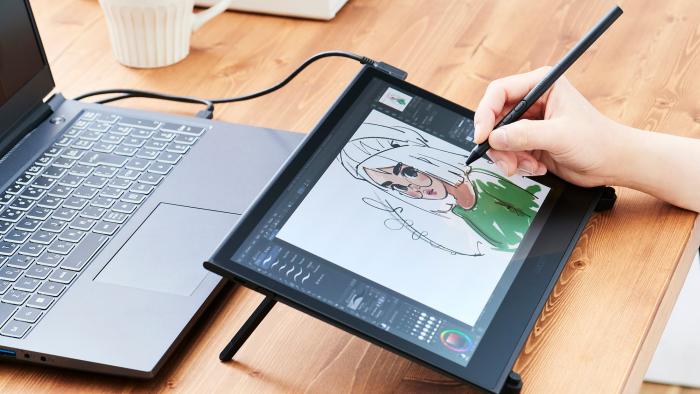
Wacom's first OLED pen display is also the thinnest and lightest it has ever madeThe 13-inch Movink is available now for $750.By B. Steele, 3 hours ago
It doesn’t matter how many Vision Pro headsets Apple sellsCan we all just calm down a bit?By S. Rutherford, 3 hours ago
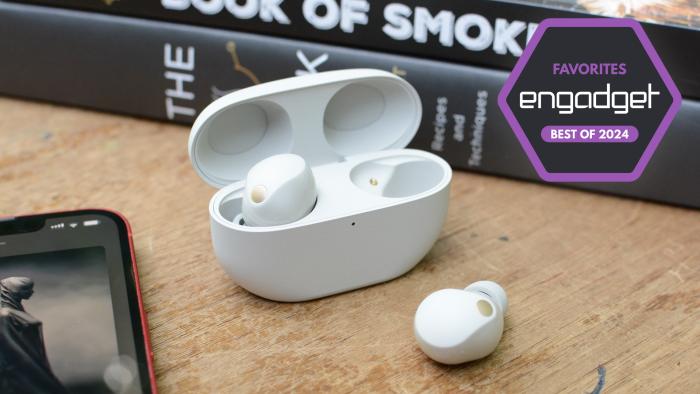
The Google Pixel Buds Pro are back on sale for $135That's the lowest price we've seen for the noise-canceling earbuds in 2024. By J. Dunn, 5 hours ago
82 13Dell XPS 13 and XPS 14 review (2024): Gorgeous laptops with usability quirksWhat will you pay for pretty laptops? By D. Hardawar, 5 hours ago
OpenAI's Sam Altman and other tech leaders join the federal AI safety boardIt's like turkeys being appointed to the Christmas oversight board. By M. Moon, 6 hours ago
The best gaming gear for graduatesWhether they’re playing games for fun or a future career, these are the best items to get.By K. Naudus, 6 hours ago
The Morning After: Apple announces an iPad event for May 7And here's what we're expecting.By M. Smith, 7 hours ago
Engadget Podcast: Why TikTok will never be the same againBiden passed the TikTok divestment bill -- now what?By D. Hardawar, 7 hours ago
The best wireless earbuds for 2024Noise-cancelling, sport models and cheap wireless Bluetooth earbud options galore.By B. Steele, 11 hours ago
Apple is launching new iPads May 7: Here's what to expect from the 'Let Loose' eventWe're likely to see an OLED iPad Pro and new iPad Air, as well as updated peripherals.By K. Holt, 21 hours ago
Spotify tests Apple's resolve with new pricing update in the EUApple is in hot water with the EU for self-preferencing. By S. Fielding, a day ago
Tupac’s estate threatens to sue Drake for his AI-infused Kendrick Lamar dissShakur’s estate may deliver Drake his AI comeuppance.By W. Shanklin, a day ago
BlizzCon 2024 is canceledBlizzard still plans to bring back the fan event in future years.By K. Holt, 04.25.2024
Reddit is back online after a major outage forced everyone to touch grassAll told, the site was down for under an hour. By L. Bonk, 04.25.2024
Formula E debuts Gen3 Evo race car: All-wheel drive unlocks 0-60 mph in 1.82 secondsAerodynamic upgrades and a new tire compound are all in pursuit of better racing.By B. Steele, 04.25.2024
Our favorite budget webcam is 20 percent off right nowThe Anker PowerConf C200 is back down to $48.By L. Bonk, 04.25.2024
Threads is getting its own Hidden Words featureThe tool has been available on its sister site Instagram. By S. Fielding, 04.25.2024
FCC votes to restore net neutrality protectionsCommissioners voted along party lines to reinstate the Obama-era rules.By K. Holt, 04.25.2024