Meta's Oversight Board will rule on AI-generated sexual imagesThe cases deal with explicit images of two public figures.By K. Bell, 17 hours ago
Netflix true crime documentary may have used AI-generated images of a real personBy S. Dent, 18 hours ago
Take-Two plans to lay off 5 percent of its employees by the end of 2024Last month CEO Strauss Zelnick said, "The hardest thing to do is to lay off colleagues and we have no current plans."By J. Conditt, 3 hours ago
NASA confirms its space trash pierced Florida man’s roofIt was part of a cargo pallet the space station dropped in 2021.By W. Shanklin, 6 hours ago
Boston Dynamics sends Atlas to the robot retirement homeThe humanoid robot is going out to pasture 11 years after its debut.By K. Holt, 8 hours ago
Ooni's largest pizza oven yet offers dual-zone heat control and temperature tracking on your phoneThe Koda 2 Max will be available in May for $999.By B. Steele, 9 hours ago
Get an Echo Pop speaker with a free TP-Link smart light bulb for only $23Bought separately and at full price, the set goes for $63.By A. Skorheim, 11 hours ago
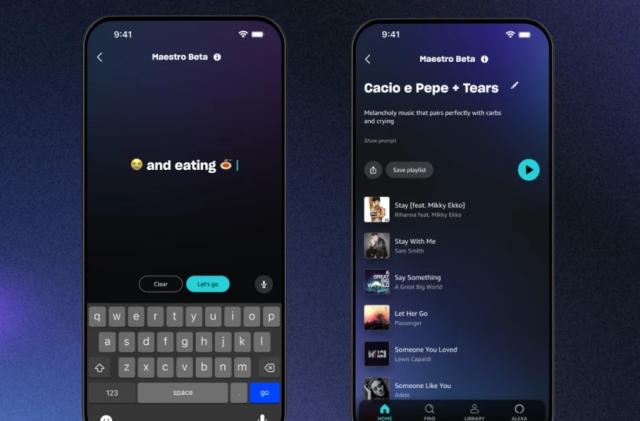
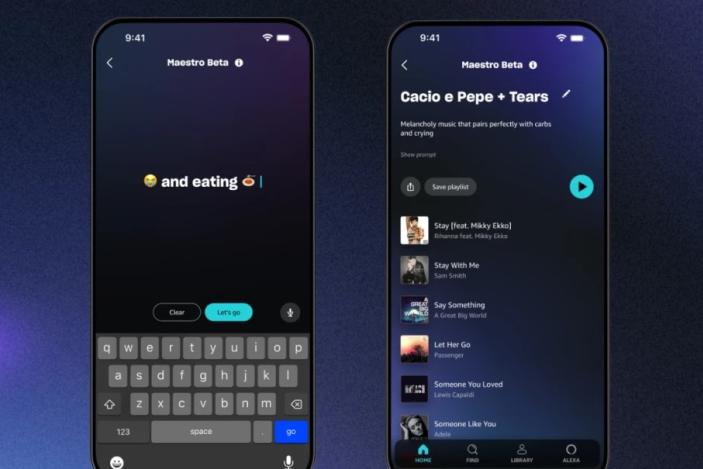
Amazon debuts a generative AI-powered playlist featureEnter a prompt and Maestro will try to come up with a bunch of songs that match it.By K. Holt, 12 hours ago
Uber will start reminding passengers to wear their seat beltIt's a simple feature that could save lives.By M. Moon, 13 hours ago
Nintendo’s next Indie World showcase is set for April 17Expect around 20 minutes of updates on indie games coming to Switch this year. By K. Holt, 13 hours ago
The Kasa Smart Plugs Mini EP25 four-pack is down to its lowest price yetIt's our favorite smart plug on the market. By S. Fielding, 13 hours ago
Google Nest Wi-Fi Pro 6E packs are up to $60 offYou can save on a two-pack or three-pack thanks to our exclusive discount code.By K. Holt, 14 hours ago
Insta360’s X4 captures 8K 360-degree videoAnd is better than the last model in every way.By M. Smith, 14 hours ago
YouTube prevents ad-blocking mobile apps from accessing its videosThe service waged a war against ad blockers last year.By M. Moon, 14 hours ago
The best budgeting apps for 2024Now that Mint has been shut down, here are the best 6 budgeting apps to help you spend and save wisely in 2024.By D. Wollman, V. Palladino, 15 hours ago
Motorola’s Edge 50 phone series includes a wood optionIt's also releasing the Moto Buds+ for $130. By S. Fielding, 15 hours ago
The Morning After: Samsung is, once again, shipping the most phones in the worldApple interrupted its decade-plus run in 2023.By M. Smith, 16 hours ago
Meta’s Oversight Board will rule on AI-generated sexual imagesThe cases deal with explicit images of two public figures.By K. Bell, 17 hours ago
The best smartwatches for 2024Our guide to picking the best smartwatch for you (and no, the Apple Watch isn't your only option). By V. Palladino, C. Low, 18 hours ago
Netflix true crime documentary may have used AI-generated images of a real personThe move raises questions about the ethical use of manipulated imagery. By S. Dent, 18 hours ago
Keanu Reeves is reportedly playing Shadow the Hedgehog in Sonic 3The broody antihero sounds like a good fit for the actor.By M. Moon, 19 hours ago
Threads is testing real-time search resultsThe change could make the app feel more useful for finding news and timely information.By K. Bell, 04.15.2024