40 11Rabbit R1 review: A $199 AI toy that fails at almost everythingBetween this and Humane's Pin, AI gadgets seem pretty useless.By D. Hardawar, 05.03.2024
Helldivers 2 PC players suddenly have to link to a PSN account and they're not being chill about itBy L. Bonk, 05.03.2024
Boeing's Starliner spacecraft may finally take its first crewed flight next weekBy C. MacDonald, 05.03.2024
The Apple Watch Series 9 is back on sale for $299, plus the rest of this week's best tech dealsBy A. Skorheim, 05.03.2024
Boeing's Starliner spacecraft may finally take its first crewed flight next weekBy C. MacDonald, 05.03.2024
The Apple Watch Series 9 is back on sale for $299, plus the rest of this week's best tech dealsBy A. Skorheim, 05.03.2024
Jack Dorsey says (on X) that he’s not on the Bluesky board anymoreThe company hasn't publicly confirmed his departure. By C. MacDonald, 5 hours ago
Threads now lets you control who can quote your postsAdam Mosseri announced on Threads that the feature is rolling out to everyone.By C. MacDonald, 05.04.2024
Parrots in captivity seem to enjoy video-chatting with their friends on MessengerA study suggests pet birds may prefer engaging in live calls with each other over watching pre-recorded videos. By C. MacDonald, 05.04.2024
Google prohibits ads promoting websites and apps that generate deepfake pornThe new policy will take effect on May 30.By M. Moon, 05.04.2024
X is using Grok to publish AI-generated news summariesIt's a lot like Twitter Moments, but powered by AI.By K. Bell, 05.03.2024
Nintendo blitzes GitHub with over 8,000 emulator-related DMCA takedownsThey contain code from the Yuzu Switch emulator.By W. Shanklin, 05.03.2024
Helldivers 2 PC players suddenly have to link to a PSN account and they're not being chill about itThe game didn't require this step when it launched. By L. Bonk, 05.03.2024
Redfall’s two DLC heroes are still MIA a year laterCustomers paid an extra $30 over the base game’s $70 for content that’s looking more like vaporware.By W. Shanklin, 05.03.2024
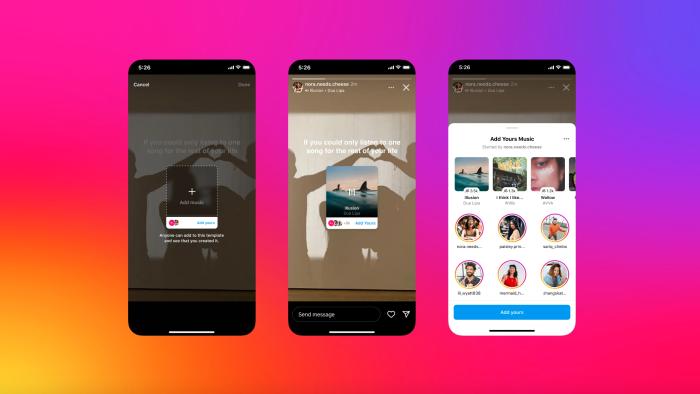
Instagram's 'Add Yours' sticker now lets you share songsThere are also some interactive new features for Stories. By L. Bonk, 05.03.2024
Apex Legends is getting a solo mode for the first time in five yearsRespawn said as recently as January it had no plans to bring back a single-player option.By K. Holt, 05.03.2024
A four-pack of Samsung's Galaxy SmartTag 2 trackers is back on sale for $70That matches the lowest price we've seen for the AirTag alternative.By J. Dunn, 05.03.2024
Research indicates that carbon dioxide removal plans will not be enough to meet Paris treaty goalsThere’s a fairly large gap between what nations have committed to and what is required to limit warming to 1.5C. By L. Bonk, 05.03.2024
40 11Rabbit R1 review: A $199 AI toy that fails at almost everythingBetween this and Humane's Pin, AI gadgets seem pretty useless.By D. Hardawar, 05.03.2024
The Apple Watch Series 9 is back on sale for $299, plus the rest of this week's best tech dealsDiscounts include sale prices on gear from Bose, Anker, Apple, Samsung and more. By A. Skorheim, 05.03.2024
Boeing’s Starliner spacecraft may finally take its first crewed flight next weekBetter late than never?By C. MacDonald, 05.03.2024
Google says Epic’s Play Store demands are too much and too self-servingThe developers demands apparently go 'beyond the scope of the recent US trial verdict.'By M. Moon, 05.03.2024
The best gifts to upgrade your grad’s tech setupAfter many years of use, it's time for a change.By N. Ingraham, 05.03.2024
Boom's XB-1 supersonic jet has been authorized to break the speed of soundTests are planned for later this year in Mojave, Ca's supersonic corridor.By S. Dent, 05.03.2024
The Morning After: Peloton's grim post-pandemic realityIt went from $50 billion at its peak to $1 billion.By M. Smith, 05.03.2024